NEPI Engine – Hardware Driver Support Tables
Introduction
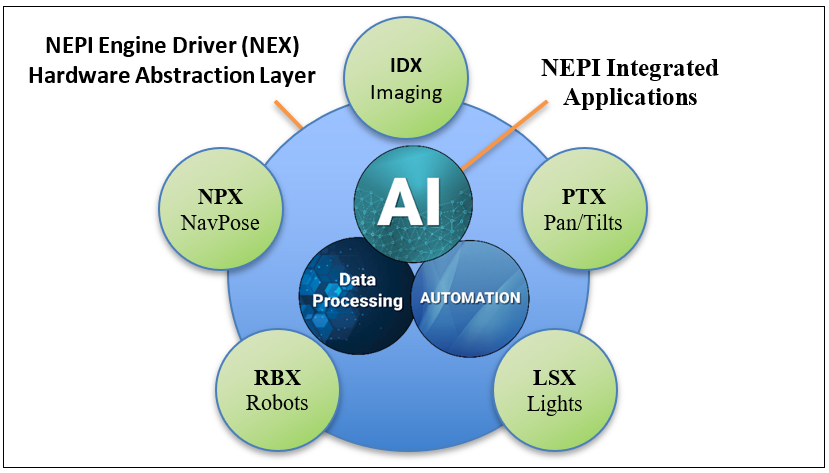
The NEPI Engine Driver (NEX) interface system provides plug-and-play interfacing with a growing list of sensor, lights, actuators, navigation, communication, and robotic control system hardware. NEPI’s NEX interface drivers provide a hardware abstraction layer that allows downstream applications to work with any supported hardware system without any modifications to the application layer code or processes. The NEPI NEX drivers are organized into functional driver classes (i.e. imaging sensors, navigation sensors, lights, pan and tilt, robotic control systems…). Each NEX driver group driver class provides standardized data and control interfaces appropriate for each class.
NEPI NEX Driver Classes and Descriptions
| Driver Class Name | Description |
| NPX | Navigation and Pose Systems |
| IDX | 2D and 3D Imaging Sensors |
| LSX | Lights and Strobes |
| PTX | Pan & Tilt Actuators |
| RBX | Robotic Control Systems |
| CMX | Communications Hardware |
The following sections provide a high-level description of each NEPI NEX driver class and a table of currently supported hardware interfaces, including hardware that the driver has been tested with. For more detailed information on NEX driver interfaces, and building your own custom NEX drivers, see the NEPI Engine – NEX Hardware Interface Manual at:
https://nepi.com/documentation/
(NPX)Navigation and Pose Systems
The NPX driver abstraction layer provides plug and play integration and common API interface for all connected navigation and positioning systems, regardless of their native interface, making data manipulation, data geo tagging, and automation processes easy to build, maintain, and reuse across all types of solution platforms.
| Type | Software Interface | Tested-On Manf/Models |
| GPS | Serial (NMEA) | (Ublox Neo-M8N ) |
| Serial (MAVLink) | Pixhawk/PX4, Pixhawk/6C | |
| IMU | Serial (MAVLink) | Pixhawk/PX4, Pixhawk/6C |
| PanTilt | Serial | Sidus SS109 |
| INS | Serial (NMEA PAUV) | VideoRay/Defender |
| Serial (MAVLink) | Pixhawk/PX4, Pixhawk/6C | |
| Serial (MANF) | Parker/Lord Microstrain AHRS* |
* Currently supported through an installed interface provided by the manufacture
2D and 3D Imaging Sensors
The IDX driver abstraction layer provides plug and play integration and common API interface for all connected 2D and 3D imaging devices, regardless of their native software interface, making downstream edge-processing applications easy to build, maintain, and reuse across all types of imaging sensor devices.
| Type | Software Interface | Tested-On Manf/Models |
| 2D Cameras | USB2(UVC) | E-Con/See3CAM_CU81, Stereolabs/Zed2 (as 2D side-by-side USB camera), Logitech/C920-series, Webcam/Generic |
| USB3 (GenICam) | IDS / U3-3280CP | |
| Ethernet (IP: ONVIF) | E-Con/RouteCAM POE, SIDUS/SS400, Onwote/HD, DeepSea/Multi SeaCam, Watec/wat-933 | |
| Ethernet (IP: GenICam) | IDS / GV-280FA-C-HQ, FLIR / Blackfly S POE | |
| 2D Sonar | Ethernet | Tritech Gemini 720iks Gemini 720iks |
| 3D Cameras | USB3 (ZED ROS) | StereoLabs/Zed2 and Zed2i Cameras* |
*First time connection requires having your NEPI device connected to the internet to download the devices calibration file after first connection, or manually copying the camera’s calibration file to the correct location in the NEPI file system. For more details on connecting StereoLab ZED camera’s see the NEPI Engine – ZED Stereo Camera Interfacing guide at:
https://nepi.com/documentation/nepi-engine-zed-stereo-camera-interfacing/
Lights and Strobes
The LSX driver abstraction layer provides plug and play integration and common API interface for all connected light and strobe illumination devices, regardless of their native software interface, making downstream edge-processing applications easy to build, maintain, and reuse across all types of illumination devices.
| Type | Software Interface | Tested-On Manf/Models |
| LED Light | RS232/RS485 | DeeSea/LED SeaLite, Sidus/SS182mkII |
Pan & Tilt Actuators
The PTX driver abstraction layer provides plug and play integration and common API interface for all connected pan and tilt actuator systems, regardless of their native interface, making setup, control, feedback, and automation processes easy to build, maintain, and reuse across all types of solution platforms.
| Type | Software Interface | Tested-On Manf/Models |
| USB | ModBus RTU over Serial | Iquotient Robotics ROS Based Pan Tilt |
| Serial | RS232/RS485t | Sidus/SS109Pan Tilt |
Communication Hardware
The CMX driver abstraction layer provides plug and play integration and common API interface for all connected communication devices, regardless of their native interface, making two-way data transfer processes, both persistent and non-persistent, between NEPI devices and remote systems easy to build, maintain, and reuse across all types of communications gateways.
| Type | Interface/Protocol | Tested-On Manf/Models |
| Ethernet | TCP/IP | All supported board NICs |
| WiFi | TCP/IP (AP and Client) | AzureWave AW-CB375NF |
| Cellular | 4G/5G Serial | Microhard/LTECUBE |
Robotic Control Systems
The RBX driver abstraction layer provides plug and play integration and common high-level API interface for all connected robotic control systems, regardless of their native software interface, making downstream edge-processing applications easy to build, maintain, and reuse across all types of imaging sensor devices.
| Type | Software Interface | Tested-On Manf/Models |
| Drone | MAVLink (Mavros) | Pixhawk 4, Pixhawk 6C* |
*Currently supported with NEPI automation driver script available at:
https://github.com/numurus-nepi/nepi_sample_auto_scripts