NEPI Engine – Data File Format Details
Introduction
NEPI Engine’s data management system provides built-in functionality for saving various types of data in standardized formats to a NEPI device’s on-board user storage drive. This includes navigation and positioning data NEPI’s NavPose management system, 2D and 3D data from NEPI IDX driver supported imaging sensors, and NEPI’s AI application.
File Naming Conventions
All files start with the following standard date and time stamp based on the internal NEPI clock when the data was produced.
year_month_dayThour_min_sec.msec
Where the T is a separator between the date and time stamp information, which is then followed by a standard convention for the data’s source name and data type name as shown in the table below.
NEPI Data Source and Type Naming Conventions
Type | File Name Source and Type Convention |
NavPose Data | nav_pose_mgr_nav.txt |
Image Data | SensorName_DataType.png |
Pointcloud Data | SensorName_pointcloud.pcd |
AI Detection Data | Classifier_bounding_boxes.txt |
NOTE: File names prefixes and subdirectory pathnames can be adjusted via API or RUI. The Following show only the unaltered base name without standard timestamp prefix, etc.
Example:
2023-03-27T140435.336_nexigo_n60_fhd_webcam_audio_color_2d_img.png
2023-03-27T180424.382_nav_pose_mgr_nav.yaml
2023-03-27T140435.565_nexigo_n60_fhd_webcam_audio_bw_2d_img.png
2023-03-27T140435.537_classifier_bounding_boxes.txt
2023-03-27T140435.247_zed2_stereo_camera_sensor_calibration.txt
2023-03-27T140435.220_zed2_stereo_camera_depth_map.png
2023-03-27T140435.220_zed2_stereo_camera_color_2d_img.png
2023-03-27T140435.220_zed2_stereo_camera_depth_image.png
2023-03-27T140435.822_zed2_stereo_camera__pointcloud.pcd
Data File Save Rates
NEPI Engine’s integrated data management system allows setting a max save rate for each sensor individually or globally for all data types. The set rates do not guaranty a save rate, they just set the maximum rate. If a specific data stream is updating slower than the set rate, data is saved at the data stream rate.
NOTE: Only one NavPose data file is created at the start of each save session, with updates appended to the created file during the session.
Data File Formats
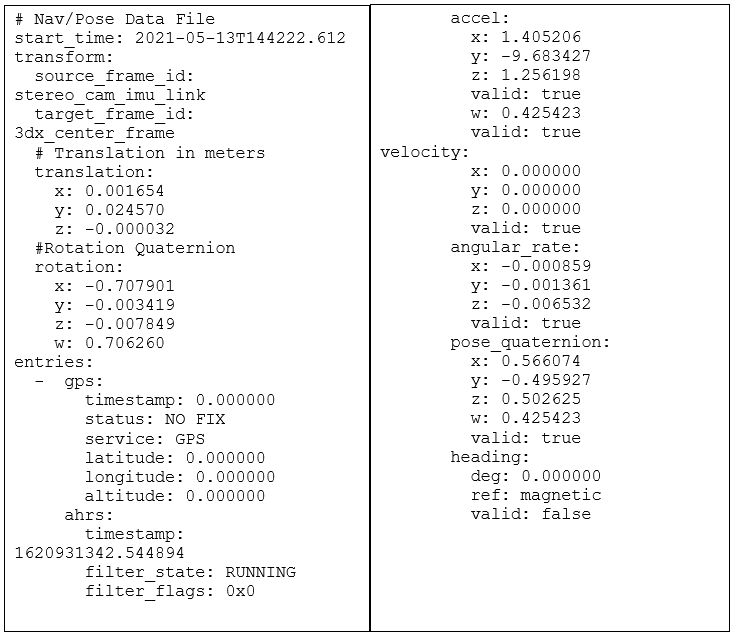
NavPose Manager Navigation and Pose Data
NavPose data files contain the Data is saved in a human-readable (yaml) format that includes source to target transform tree, GPS fix and status, attitude (quaternion) fix and status, and heading fix and status. Only a single file is created and appended with updates during a given save process.
File data format: yaml
Example:
IDX Sensor Image and Pointcloud Data
All IDX image sensor drivers support saving supported data at a max rate and standardized data formats regardless of the hardware that produced it. Each file includes the sensor name that produced it and the file data type identifier in the filename. Currently supported data types and data format details are provided in the table below.
NEPI Image and Pointcloud File Data Types and Formats
Data Type | File Data Format |
color_2d_img | RGB Color image, 24-bit color depth (8 per channel), PNG format. |
bw_2d_img | Grayscale image, 8-bit color depth, PNG format. |
depth_map | Depth map, each 16-bit each pixel represents distance (in millimeters), For programmatic consumption; typically not well-displayed in image viewer applications, PNG format. |
depth_image | RGB Color image, each pixel represents distance in a dynamic, user-selectable color mapping and scaling, 24-bit color depth, PNG format. |
pointcloud | 3D pointcloud in PCD format (binary, compressed, RGB colored for some sensors); all x,y,z distances in meters. |
sensor_calibration | Includes active calibration info. Single file saved at the start of a save process and/or on user request. Contents are sensor-dependent. XML file format. |
NOTE: Not all Data Types are supported are supported by all NEPI IDX sensors. Supported output data is hardware and s/w-driver dependent.
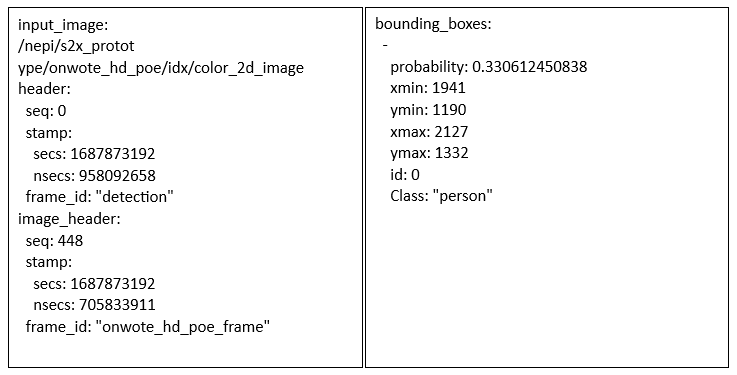
AI Detection Data
Data output from NEPI’s integrated edge AI application saves data in a human-readable (yaml) format that includes detected object and bounding box description data for each detection process. A single detection process may include details for multiple detection boxes if multiple objects were detected during that AI detection process. Detection data is only saved if at least one object was detected during a given AI detection process.
File data format: yaml
Example: