NEPI Engine – API Manual
Introduction
This document describes the API interface for NEPI Engine AI and automation software running on edge-compute devices. It is intended for software developers interacting with and integrating a NEPI-enabled device and those developing custom software solutions to run in a NEPI Edge environment.
NEPI API Options
NEPI-enabled edge devices provide a number of APIs for integration with custom and third-party on-device software and network attached systems. The following list provides a high-level view of the available APIs, including some notes about appropriate use. See additional sections in this document for Fmore details.
Websocket API for small payload command and control via web apps
– JSON-based protocol provided via rosbridge: http://wiki.ros.org/rosbridge_suite
– Freely available client libraries for many programming languages: https://github.com/RobotWebTools/rosbridge_suite#clients
– Not appropriate for large data like imagery, pointclouds, etc.
– Leveraged by NEPI Resident User Interface (RUI) for device configuration, command, and control
HTTP video/snapshot server
– Provided via web_video_server: http://wiki.ros.org/web_video_server
– Makes all image topics in the ROS network available to client apps
– Parameters to configure stream or snapshot size, quality, transport, etc.
– Leveraged by NEPI RUI for image streams
ROS API
– Primary API based on ROS communication primitives
– Most complete API in terms of access to NEPI functionality
– Requires ROS installation on any external systems
Sensor-specific APIs
– Sensors and actuators attached to NEPI-enabled devices often provide additional APIs and webservers, which are made directly available to applications via NEPI network bridging
– Examples include HTTP and RTSP for webcams, ONVIF for security-based IP cameras, etc.
(Planned) ROS2 API
– Currently available in limited sense via the ros1_bridge: https://github.com/ros2/ros1_bridge
(Planned) Ultra low-latency direct image and pointcloud socket servers
– Direct access to all sensor streams without any ROS translation overhead
NEPI Websocket API
NEPI runs a websocket server that converts JSON-formatted messages to/from ROS according to the rosbridge protocol. This capability is provided by the rosbridge_server, as detailed here: https://github.com/RobotWebTools/rosbridge_suite.
This API is well-suited for external clients that are not able to install ROS directly on the external system or for software written in programming languages that do not have robust ROS client libraries (i.e., JavaScript). It provides a complete NEPI ROS API replacement, including all topics and services.
For small payload topics and services, the translation overhead is minimal. However, large binary data payloads (e.g., images, pointclouds) are converted to Base64-formatted character strings, a process that incurs considerable overhead on both the encoding and decoding side, leading to extreme transfer latencies for these kinds of payloads. It is not recommended to use the websocket server for these kinds of data products. Instead, a non-ROS user can use the HTTP Video and Snapshot API detailed below to obtain NEPI imagery in the browser or in a client application. At present, point cloud streaming is only supported for ROS clients.
By default, the rosbridge websocket server runs on the NEPI device at port 9090. The RUI leverages the websocket server, so adjusting this port also requires modifying and rebuilding the RUI.
The process of connecting programmatically to the rosbridge websocket server depends on the client-side programming language and client library. For example, in JavaScript using the roslibjs client library, the following would work:
self.ros = new ROSLIB.Ros({ url: 'ws://192.168.179.103:9090'});
It is not strictly necessary to use a rosbridge client library; it is possible to interact directly with the device as a “raw” websocket server. However, this requires considerably more client-side knowledge and coding, so it is advised to use a client library whenever practical – The rosbridge_suite link above is a good place to find some of the available client libraries and a complete set of documentation.
HTTP Video and Snapshot API
NEPI provides all ROS image topics over a web server as an HTTP stream as detailed here: http://wiki.ros.org/web_video_server.
The weblink list of available image streams is provided at URL http://192.168.179.103:9091/
And individual image streams are available as stand-alone webpages at URLs like the following: http://192.168.179.103:9091/stream_viewer?topic=/nepi/s2x_prototype/onwote_hd_poe/idx/color_2d_image
Where additional parameters can be supplied as URL parameters/query strings as in: http://192.168.179.103:9091/stream_viewer?topic=/nepi/s2x_prototype/onwote_hd_poe/idx/color_2d_image&quality=10
Embedding these image streams in a browser app requires a slightly modified URL, replacing stream_viewer with stream:
http://192.168.179.103:9091/stream?topic=/nepi/s2x_prototype/onwote_hd_poe/idx/color_2d_image
Finally, a still-frame snapshot of the next image is available at URLs like
http://192.168.179.103:9091/snapshot?topic=/nepi/s2x_prototype/onwote_hd_poe/idx/color_2d_image
While these are principally useful for web viewing, they can also be leveraged programmatically, of course, by any program that can interact with a RESTful API, so they are the preferred method for non-ROS programmatic image ingestion. For example, a client application may use an HTTP-capable client library like OpenCV to receive imagery. In python this may look something like:
import cv2
cap = cv2.VideoCapture("http://192.168.179.103:9091/stream_viewer?topic=/nepi/s2x_prototype/onwote_hd_poe/idx/color_2d_image")
while True:
ret, frame = cap.read()
cv2.imshow('video', frame)
NEPI ROS
NEPI leverages ROS 1 (Robot Operating System) robotics middleware for onboard software modules, configuration and data output. Although ROS is not an operating system in the traditional sense, it provides services designed for a heterogeneous computer cluster, including hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. ROS communication primitives form the foundation of the NEPI ROS API.
ROS 1, generally referred to simply as ROS and distinct from ROS 2, is widely adopted and very well documented online; we do not attempt to recreate that primary documentation here. For a good introduction and jumping-off point for ROS, start here: http://wiki.ros.org/
Host Installation
It is helpful, but not strictly required, to install ROS on a development host when testing NEPI-enabled devices and creating custom software that leverages the NEPI interface. Alternatively, it is usually possible to use the NEPI-device itself for this kind of development and testing, as NEPI software installations include a complete ROS build environment.
ROS installation generally requires a Debian-based Linux host, though much progress has been made in recent years to allow ROS installations on other platforms (including Windows) and in Linux-based Docker containers. Presently, NEPI runs the “Melodic” version of ROS, which is tailored for Ubuntu 18.04. It is suggested that you install ROS-Melodic (Full Desktop Version) on an Ubuntu 18.04 host, though Ubuntu 16.04/ROS-Kinetic and Ubuntu 20.04/ROS-Noetic should both work without issue.
NEPI developers routinely use a VirtualBox-based Ubuntu 18.04 Virtual Machine on a Windows host for this Ubuntu/ROS installation with good results. This development path requires proper hypervisor network configuration to ensure that the VM is able to reach the NEPI device over the network.
See here for ROS installation details: http://wiki.ros.org/melodic/Installation/Ubuntu
Host Configuration
After installing ROS on a Linux host, some additional configuration is required to interface with the NEPI system. This is generally described here: http://wiki.ros.org/ROS/Tutorials/MultipleMachines
In subsections below we detail specific settings for interfacing with NEPI.
IP Address Settings
The host PC and NEPI system must be configured with IPv4 addresses on the same subnetwork. The default NEPI subnetwork is 192.168.179.0/24, so the easiest way to accomplish this to assign the host PC a fixed IP address on that subnet.
In some integration scenarios it may not be possible to assign a host an IP on the NEPI subnet (though it is worth reminding that most modern systems allow for multiple IP address aliases to the same network interface device, so it is often as simple as adding an IP alias). If your system cannot provide an IP address on the NEPI default subnet, it is possible to assign one or more alias addresses via ROS topics as described in the NEPI Topics List below (or via the RUI). Initially, you will need a system configured for the default subnet in order to publish on the add_ip_addr topic and the save_config topic. After that the NEPI will be reachable at the new IP address (in addition to its default address).
Environment Variables
The following environment variables must be set either manually in your shell or by adding appropriate entries to your .bashrc file:
ROS_MASTER_URI=http://192.168.179.103:11311
ROS_IP=<Your Local IPv4 Addr on 192.168.179.0 subnet>
Hosts File
The NEPI device must be identifiable by hostname to your system. The easiest way to accomplish that is by adding the following entries to your /etc/hosts file.
192.168.179.103 <nepi-hostname>
Where <nepi_hostname> should be set to the actual hostname of your NEPI device.
Custom Message Types
Some of the ROS topics and services that constitute the NEPI ROS API include custom message and service types that must be known to your host device. These are hosted in a public Git repository: https://bitbucket.org/numurus/nepi_ros_interfaces/src/master/
The nepi_ros_interfaces repository is organized for inclusion in a ROS Catkin workspace, and can be built using standard catkin or “catkin tools.” Some general guidelines are provided in the following links:
http://wiki.ros.org/catkin/conceptual_overview
https://catkin-tools.readthedocs.io/en/latest/
After building the workspace, you must source the resulting setup.bash file into your environment. You can do this manually at the command-line with the source command, or it can be automated as part of a start-up script or in your .bashrc depending on the overall integration goals.
Disabling On-Board RosMaster
By default the NEPI device launches a rosmaster upon startup. When interfacing with a system with an existing rosmaster, the NEPI device can be configured not to launch its own rosmaster instance. This can be accomplished via the set_rosmaster ROS topic as described later in this document. Note that after this update, a reboot is required. At that point, the NEPI device will set its ROS_MASTER_URI environment variable as specified and will wait to launch any nodes until a connection to the master node can be established.
Warning: It is possible to effectively disable the entire NEPI ROS interface (and any other interfaces/APIs that depend on it) by misconfiguring the rosmaster URI. Care should be taken.
NEPI ROS API
Command-line and programmatic interaction with the NEPI device is provided by a collection of ROS communication primitives. Standard ROS command-line and graphical tools can be used to view data, save data, and interact with the device.
The NEPI device operates a complex ROS s/w stack with many custom and 3rd-party packages. As a result, the complete list of ROS topics it publishes and subscribes to is quite large; more than 150 at latest count. Similarly, there is a large collection of ROS services. Many of these are neither useful nor safe for end-users to manipulate, while others are redundant with alternate topics. In the tables below, we detail just those topics and services that are designated specifically as part of the current NEPI external API. For details about unlisted topics or services, consult corresponding ROS documentation and/or contact a Numurus technical representative.
ROS includes powerful command-line and graphical system introspection tools. Standard applications like rqt (and accompanying plugins), rostopic, rosservice, and rosparam are very helpful when familiarizing yourself with the NEPI ROS ecosystem. These tools can be run from the NEPI device itself (via SSH or graphical terminal) or from a development host connected to the device and configured as a ROS client of the device.
By default, the nepi user account on the NEPI device does not source any ROS setup.bash file, so command line ROS tools and applications are not immediately available in an SSH or graphical session. You can manually source a setup.bash file with
$ source /opt/nepi/ros/setup.bash
to prepare a NEPI device terminal to launch ROS applications.
Configuration Files and the Parameter Server
The NEPI ROS components make full use of the ROS parameter server, including loading and storing configuration files in YAML format.
In general, config. files are located in node-specific subfolders of
/opt/nepi/ros/etc
The NEPI ROS config system makes use of three files for each configurable node: A fixed factory config file (with extension .yaml.num_factory), a user-modifiable config. file (with extension .yaml.user), and a symbolic link to quickly and easily switch between the two (with extension .yaml). It is the symbolic link files that are loaded by the NEPI ROS launch system on start-up. In general, the contents and relationship between these files is managed under-the-hood by the NEPI config_mgr, with NEPI ROS API topics and services to change parameter values on the fly, store updates to the user config., revert on request to the default factory or current user config., etc.
On occasion, it may be necessary for a user to modify the config. files directly – in some limited instances there is no ROS NEPI API to adjust NEPI or system parameters. Generally speaking, users should not modify the yaml.num_factory files, instead ensuring existence of a corresponding .yaml.user config file, proper .yaml symlink to that file, and making updates there.
NEPI does not make use of ROS dynamic_reconfigure, instead favoring topics and services to make runtime changes to parameters and behavior. In some cases, third-party ROS nodes may include a dynamic_reconfigure interface – refer to specific third-party documentation for usage.
NEPI ROS Base Namespace
All NEPI ROS components (nodes, parameters, topics, services) reside under the NEPI ROS base namespace, a two-component namespace which generally varies from device to device; it includes a device identifier to facilitate integration of multiple NEPI devices into the same ROS network, where otherwise there would be undesirable identically named ROS components between the systems.
The general format of the base namespace is
/nepi/<device_id>/
where the device_id is some user-configurable ROS namespace-legal string. For example, the Numurus S2X product has a default device_id of s2x.
The fact that the NEPI namespace is not fixed should pose no great problem for s/w integrators; the namespace can be obtained at runtime through standard ROS introspection tools (e.g., ros topic list | grep nepi), and then cached in variables that are used to generate complete namespaces at runtime.
Relationship to NEPI RUI
The NEPI Resident User Interface (RUI) is the webservice that provides a browser-based user-facing graphical environment for configuration, control, and real-time data view capabilities for NEPI-enabled devices.
The NEPI RUI communicates primarily to the back-end ROS nodes by way of the rosbridge intermediary, which encodes and decodes ROS message and service payloads as plain JSON, allowing systems without a native ROS installation or a language-appropriate ROS client library to interact with the rest of the ROS-enabled system.
The NEPI RUI provides just a subset of full NEPI functionality exposed by the programmatic ROS interface. That is, anything a user can accomplish via RUI can also be accomplished via the ROS interface. But the converse is not true in general – there are some capabilities exposed only through the ROS interface with no corresponding RUI feature.
ROS Data Viewers
While the NEPI RUI provides an intuitive, web-based viewer for many of the 2D and 3D data products, not all data is viewable (currently) in the RUI. Moreover, as a browser-based application, the RUI suffers some inherent frame rate limitations and data latencies. This section details usage of various ROS GUI tools that provide an alternative to the RUI. It should be noted that these tools require a comprehensive ROS installation on the host; specifically, they are not available outside a Linux host, in contrast to the RUI, which as a browser application is multi-platform.
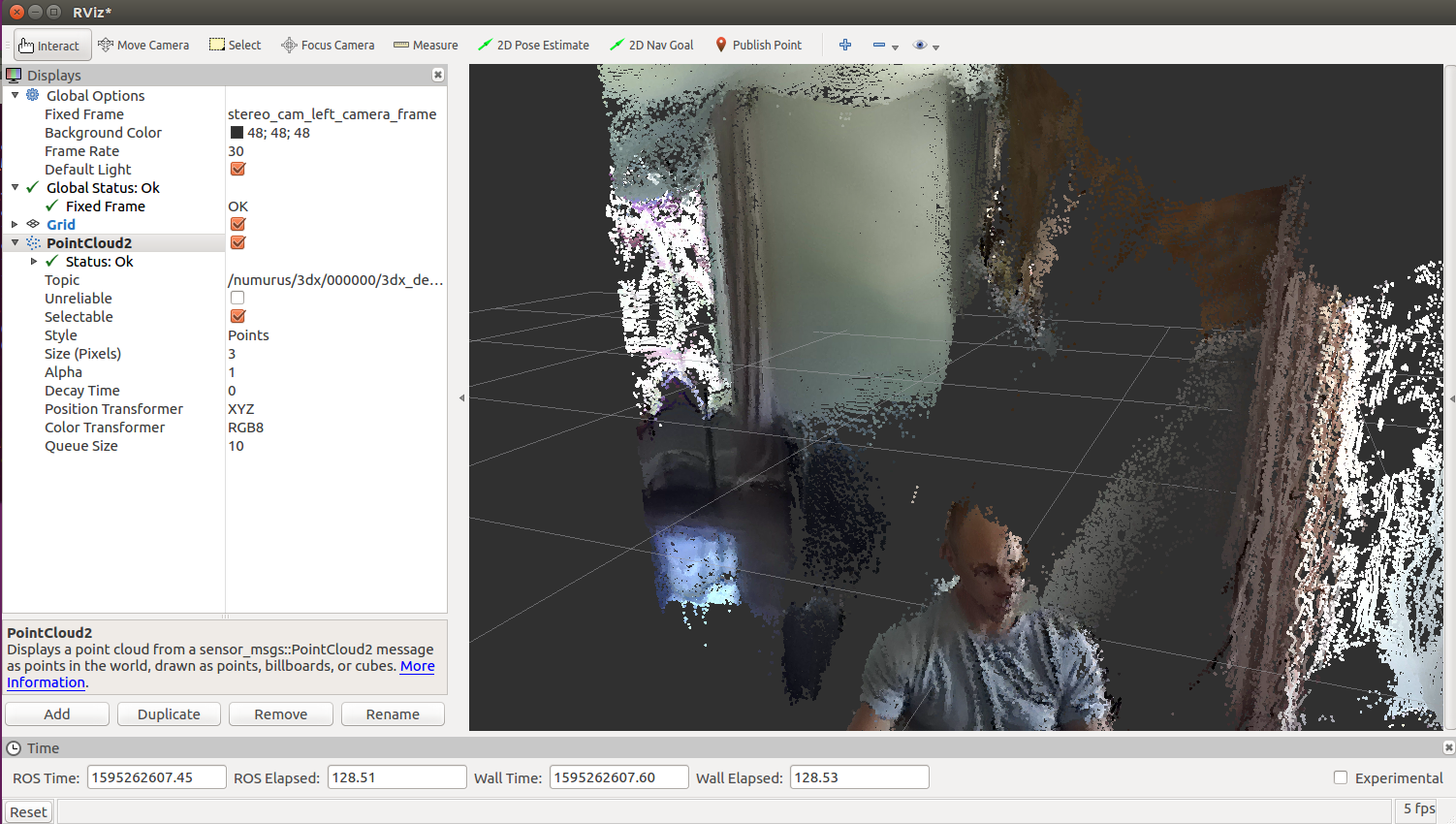
Viewing Point Clouds via RVIZ
At present, point cloud streaming is only available to ROS client systems, where the point cloud messages are streamed as a ROS topic stream. Point clouds can be viewed via the ROS rviz application. The screen shot below shows the typical configuration, though note that your device’s base namespace is likely to be different.
NEPI ROS API Details
The following tables and descriptions describe the most important ROS topics, services, and parameters that form the NEPI API. The contents are organized by namespace, and include message type(s), a short description of the purpose or contents, and the RUI equivalent section where applicable. The tables are not exhaustive; specific questions about unlisted topics should be directed to a Numurus technical representative.
The tables also include a column that specifies where in the RUI the equivalent functionality may be accessed and any details about RUI limitations compared to the direct ROS interface. Entries with nothing in this column represent functionality that is not accessible at all through the RUI.
NEPI ROS Topic Table
All topic names are with respect to the NEPI ROS Base Namespace and the node-specific namespace as identified in bold section rows.
Table 1 – NEPI ROS Topics
| TOPIC | TYPE | PUBLISHERS | SUBSCRIBERS | RUI Access |
(top level) | ||||
add_ip_addr | ||||
add_ntp_server | ||||
archive_inactive_rootfs | ||||
clear_data_folder | ||||
enable_dhcp | ||||
enable_gps_fix_override | ||||
enable_script_autostart | ||||
install_new_image | ||||
remove_ip_addr | ||||
remove_ntp_server | ||||
reset | ||||
save_config | ||||
save_data | ||||
save_data_prefix | ||||
save_data_rate | ||||
set_device_id | ||||
set_gps_fix | ||||
set_gps_fix_override | ||||
set_op_environment | ||||
set_periodic_sw_trig | ||||
set_rosmaster | ||||
set_time | ||||
set_tx_bw_limit_mbps | ||||
start_classifier | ||||
stop_classifier | ||||
submit_system_error_msg | ||||
sw_trigger | ||||
switch_active_inactive_rootfs | ||||
sys_time_updated | ||||
system_status | ||||
trigger_index_settings | ||||
/classifier/ | ||||
bounding_boxes | ||||
detection_image | ||||
found_object | ||||
/<savable_data_node_name>/ | ||||
save_data | ||||
save_data_prefix | ||||
save_data_rate | ||||
save_data_status | ||||
/<configurable_node_name>/ | ||||
reset | ||||
save_config | ||||
/<idx_sensor_node_name>/idx/ | ||||
bw_2d_image | ||||
color_2d_image | ||||
set_brightness | ||||
set_contrast | ||||
set_framerate_mode | ||||
set_resolution_mode | ||||
set_range | ||||
set_thresholding | ||||
status | ||||
/nav_pose_mgr/ | ||||
enable_attitude_override | ||||
enable_heading_override | ||||
set_ahrs_offset | ||||
set_ahrs_out_frame | ||||
set_ahrs_src_frame | ||||
set_attitude_override | ||||
set_heading_override | ||||
set_imu_topic | ||||
set_odom_topic | ||||
/nepi_link_ros_bridge/ | ||||
connect_now | ||||
enable | ||||
enable_nepi_log_storage | ||||
hb/enable | ||||
hb/set_auto_data_offloading | ||||
lb/create_data_set_now | ||||
lb/enable | ||||
lb/select_data_sources | ||||
lb/set_data_sets_per_hour | ||||
set_auto_attempts_per_hour | ||||
/rui_config_mgr/ | ||||
settings | ||||
/sequential_image_mux/ | ||||
configure_mux_sequence | ||||
delete_mux_sequence | ||||
NEPI ROS Topic Descriptions
Following subsections describe each NEPI ROS Topic. Refer to tables in the previous section for payload details, RUI equivalent, etc.
Topic: add_ip_addr
Add an IP address alias to the main ethernet interface. Payload should be CIDR formatted (e.g., 192.168.100.103/24)
Topic: add_ntp_server
Add a new network time protocol (NTP) server. Payload is an IPv4 address with no netmask indicator or a resolvable hostname (if NEPI device is attached to a proper DNS server)
Topic: archive_inactive_rootfs
Create a complete binary image of the “inactive” rootfs partition copied to the user partition. Can be used in conjunction with switch_active_inactive_rootfs topic and system reboot to switch current active to inactive in order to archive the image.
Topic: clear_data_folder
Delete all contents of the Data folder on the user partition.
Topic: enable_dhcp
Enable NEPI device to act as DHCP client to set additional IP address alias for the primary Ethernet interface.
Topic: enable_gps_fix_override
Enable/disables NEPI GPS fix override. When enabled, NEPI uses and reports the override fix rather than any external GPS stream. See set_gps_fix_override.
Topic: enable_script_autostart
Enable/disable auto-start on boot for the specified automation script.
Topic: install_new_image
Install the currently detected NEPI complete ROOTFS image to the current “inactive” partition
Topic: remove_ip_addr
Remove a previously added IP address. Payload is a CIDR-formatted IPv4 address. Note: It is not possible to remove the default device IP address in this way, only user-configured or DHCP-assigned alias addresses.
Topic: remove_ntp_server
Remove a configured NTP server from the list of available servers.
Topic: reset
Execute a configuration reset for a particular node or all nodes simultaneously. The payload indicates what type of reset to perform. A “User” reset will revert any current changes that have not yet been stored to the device. A “Factory” reset will revert configuration back to the factory default settings. In the case of “Factory” reset, previous user settings are retained for archival purposes, but restoring them requires manual filesystem intervention. “Hardware” and “Software” reset effect depends on the particular node.
Topic: save_config
Store the current configuration parameters for a particular node or all nodes simultaneously (depending on topic namespace level). After configuration is stored, a subsequent system reboot will restore these parameters. See reset for details about reverting user-stored settings to factory defaults.
Topic: save_data
Start saving all configured data products for a particular node or all nodes simultaneously (depending on topic namespace level). Data products are saved at a pre-configured rate and with pre-configured filename prefix.
Topic: save_data_prefix
Set a prefix and/or subdirectory path for saved data filenames. If the prefix includes one or more forward-slash characters after strings the prefix will be treated as a subdirectory hierarchy (below the user partition Data folder).
Topic: save_data_rate
Set the rate at which a particular data product or all data products (depending on payload) for a particular node or all nodes (depending on topic namespace level) is saved to disk. This rate serves as a soft max – data products that are produced at a lower rate than this max will save at their full rate.
Topic: set_device_id
Set a new device ID, which is used in the NEPI ROS base namespace, /nepi/<device_id>. Requires a reboot to take effect.
Topic: set_gps_fix
ROS interface for GPS lat/lon/altitude solution. Published by the NEPI GPSD ROS client that interfaces GPSD server to ROS, but can also be published externally to update the Nav/Pose solution
Topic: set_gps_fix_override
Set the override (typically static/fixed) GPS solution. If GPS fix override is enabled (see enable_gps_fix_override), this value will be used instead of any value streamed via the set_gps_fix live topic.
Topic: set_op_environment
Set the system “operating environment,” which controls various aspects of the system. Valid operating environment variable vary system by system. For example, a submersible system with cameras may include “water” and “air” operating environments to adjust camera calibrations depending on whether the systems are submerged or not.
Topic: set_periodic_sw_trig
Some NEPI sensors and actions are s/w-triggerable and have a mask value associated with them so that a single numeric trigger message can control multiple trigger events simultaneously and selectively. This topic sets NEPI to provide a particular s/w trigger value at a specified rate. Additional triggers with different trigger values can be set to run complex trigger scenarios.
Topic: set_rosmaster
Set the NEPI device ROS_MASTER_URI environment variable for networking scenarios with an external rosmaster in the network. Requires reboot after setting. Warning: This topic can render ROS API unusable if the specified rosmaster does not exist or is not network reachable. NEPI device attempts to ping the new rosmaster before accepting this setting to ensure that it exists and is reachable, but there is no fallback mechanism if that condition is not met on subsequent power cycles.
Topic: set_time
Sets the NEPI device system clock to the specified value for scenarios where NTP is not available.
Topic set_tx_bw_limit_mbps
Sets an upper limit on the network transmit throughput of the NEPI device’s main interface. Useful in bandwidth-constrained networks to avoid swamping the network with large data traffic from NEPI.
Topic: start_classifier
Start an AI classifier inference model with specified input image stream, confidence threshold, and network model. If a classifier is already running, this topic will force it to stop and restart with the specified payload parameters.
Topic: stop_classifier
Stop a currently-running classifier
Topic: submit_system_error_msg
Typically used only internally by NEPI, this topic is also available to be published on by custom nodes. Primary use is to push a message into the system_msgs list that is displayed in RUI, etc.
Topic: sw_trigger
Send a s/w trigger with numeric value payload. The payload is a bitmask that indicates which triggerable nodes (sensors, events, etc.) should be activated.
Topic: switch_active_inactive_rootfs
Set NEPI device to boot to the currently inactive ROOTFS on next boot. Useful for forcing a s/w version fallback or in preparation for archiving or overwriting the current active ROOTFS (which must be made inactive before either of these operations can be performed).
Topic: sys_time_updated
This topic is published whenever the NEPI device system clock is updated via initial NTP synchronization or the set_time topic. Primarily used by NEPI internally, but can be helpful for guarding against unexpected timestamp jumps or failed s/w timeouts, etc. in custom nodes.
Topic: system_status
Top-level system status published by the NEPI system manager. Includes current time, temperature(s), user partition disk status, etc.
Topic: trigger_index_settings
NEPI triggerable nodes publish to this topic to inform the NEPI Trigger Manager (and any other nodes that care) their individual trigger index/mask value. Typically only used internally.
Topic: classifier/bounding_boxes
Output data topic from classifier that provides a small payload readable-text list of current detections, including identifying details about the source image and the image boundaries of a bounding box that contains the detected object.
Topic: classifier/detection_image
Output data topic from classifier that is a copy of the classifier input image with bounding box and object labels overlaid.
Topic: classifier/found_object
Output data topic from classifier that provides the count of detected objects in the most recent input image
Topic: idx/bw_2d_image
Grayscale 2D image produced by a NEPI IDX sensor. Only advertised if available for that particular sensor.
Topic: idx/color_2d_image
Full color 2D image produced by a NEPI IDX sensor. Only advertised if available for that particular sensor.
Topic: idx/set_brightness
Topic to adjust sensor “brightness.” Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/set_contrast
Topic to adjust sensor “contrast.” Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/set_framerate_mode
Topic to adjust sensor “framerate” between 4 distinct values. Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/set_range
Topic to adjust sensor “start range” and “stop range.” Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/set_resolution_mode
Topic to adjust sensor “resolution” between 4 distinct values. Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/set_thresholding
Topic to adjust sensor “thresholding” value. Actual effect depends on sensor including any config. file-based parameter remapping. Only advertised if available for that particular sensor.
Topic: idx/status
Published by NEPI IDX sensors to inform of their current IDX parameter values.
Topic: nav_pose_mgr/enable_attitude_override
Enables/disables the attitude override value to take precedence over any live attitude received by the device
Topic: nav_pose_mgr/enable_heading_override
Enables/disables the heading override value to take precedence over any live heading received by the device
Topic: nav_pose_mgr/set_ahrs_offset
Sets the attitude/heading reference 6-DOF offset value. This represents the transform from the AHRS sensor to the NEPI center frame of reference.
Topic: nav_pose_mgr/set_ahrs_out_frame
Sets the desired output frame of reference (by name) for AHRS data. Frame must be defined in the ROS tf subsystem.
Topic: nav_pose_mgr/set_ahrs_src_frame
Sets the input frame of reference (by name) for AHRS data, typically the frame for the AHRS sensor, itself. Frame must be defined in the ROS tf subsystem.
Topic: nav_pose_mgr/set_attitude_override
Sets the attitude override values, which take precedence over any dynamic streaming attitude input whenever enable_attitude_override is set true.
Topic: nav_pose_mgr/set_heading_override
Sets the heading override value, which takes precedence over any dynamic streaming heading input whenever enable_heading_override is set true.
Topic: nav_pose_mgr/set_imu_topic
Specifies the ROS topic (full namespace) for IMU data (as input to nav_pose_mgr). This only has an effect when the AHRS type is set to ROS.
Topic: nav_pose_mgr/set_odom_topic
Specifies the ROS topic (full namespace) for Odometry data (as input to nav_pose_mgr). This only has an effect when the AHRS type is set to ROS.
Topic: nepi_link_ros_bridge/connect_now
Starts a synchronous NEPI Connect session to the configured cloud endpoint. This connection attempt will occur right away as long as another Connect session is not already in process. It has no impact on any configured periodic sessions (as configured by set_auto_attempts_per_hour).
Topic: nepi_link_ros_bridge/enable
Enable or disable all NEPI Connect features. When disabled, no scheduled LB data sets will be collected, no scheduled Connect sessions will be started, and no synchronous attempts at either will be honored.
Topic: nepi_link_ros_bridge/enable_nepi_log_storage
When enabled, NEPI Connect session logs are stored to the Logs folder in the user partition and can be uploaded to Cloud endpoint as part of an HB data upload session.
Topic: nepi_link_ros_bridge/hb/enable
Enable/disable HB session during NEPI Connect sessions. Only when enabled will HB features execute, including auto_data_offloading.
Topic: nepi_link_ros_bridge/hb/set_auto_data_offloading
Enable/disable automatic Data folder offloading during NEPI Connect sessions. Be aware that when enabled, all Data folder contents will be uploaded to cloud (via rsync, so redundancy is avoided) on each Connect session, which can require significant network bandwidth and cloud-side storage.
Topic: nepi_link_ros_bridge/lb/create_data_set_now
This topic will synchronously launch LB data collection as configured independent of any scheduled data set construction (via set_data_sets_per_hour).
Topic: nepi_link_ros_bridge/lb/enable
Enable/disable LB data collection and LB session during NEPI Connect sessions. Only when enabled will LB features execute.
Topic: nepi_link_ros_bridge/lb/select_data_sources
Set the ROS topics that are subscribed to during LB data collection, and any built-in or custom scripts that convert those topics to appropriate LB data files. This sets up the data snippets for LB sessions.
Topic: nepi_link_ros_bridge/lb/set_data_sets_per_hour
Configure the schedule that controls when automatic LB data sets are collected (according to the select_data_sources configuration).
Topic: nepi_link_ros_bridge/set_auto_attempts_per_hour
Configure the schedule that controls automatic NEPI Connect session attempts.
Topic: sequential_image_mux/configure_mux_sequence
Create or update a complete image mux sequence to generate a round-robin type image sequence topic for downstream consumers
Topic: sequential_image_mux/delete_mux_sequence
Delete an existing image mux sequence from the list of available mux sequences. Note, this is distinct and more extreme than disabling an existing image mux sequence (as is possible with configure_mux_sequence).
NEPI ROS Service Table
All service names are with respect to the NEPI ROS Base Namespace and the node-specific namespace as identified in bold section rows.
Table 2 – NEPI ROS Services
| SERVICE | ||
| /automation_mgr/ | ||
| get_running_scripts | ||
| get_script_status | ||
| get_scripts | ||
| get_system_stats | ||
| launch_script | ||
| stop_script | ||
| /config_mgr/ | ||
| factory_reset | ||
| user_reset | ||
| /<idx_sensor_node_name>/ | ||
| idx/capabilities_query | ||
| /<savable_data_node_name>/ | ||
| <savable_data_node_name>/query_data_products | ||
| /nav_pose_mgr/ | ||
| nav_pose_query | ||
| nav_pose_status_query | ||
| /nepi_darknet_ros_mgr/ | ||
| img_classifier_list_query | ||
| img_classifier_status_query | ||
| /nepi_link_ros_bridge/ | ||
| nepi_link_status_query | ||
| /network_mgr/ | ||
| bandwidth_usage_query | ||
| ip_addr_query | ||
| wifi_query | ||
| /sequential_image_mux/ | ||
| mux_sequence_query | ||
| /system_mgr/ | ||
| op_environment_query | ||
| sw_update_status_query | ||
| system_defs_query | ||
| system_storage_folder_query | ||
| /time_sync_mgr/ | ||
| time_status_query | ||
| /trigger_mgr/ | ||
| trigger_defs | ||
| trigger_status_query | ||
NEPI ROS Service Descriptions
Following subsections describe each NEPI ROS Service. Refer to tables in the previous section for payload details, RUI equivalent, etc.
Service: automation_mgr/get_running_scripts
Query for the list of automation scripts currently running.
Service: automation_mgr/get_scripts
Query for the list of all automation scripts currently known to NEPI Automation Manager
Service: automation_mgr/get_system_stats
Query for the running statistics for a single script (identified by name)
Service: automation_mgr/launch_script
Synchronously start an automation script (identified by name). Note: this call attempts to start an additional instance of the script even if there is already an instance running.
Service: automation_mgr/stop_script
Force a currently running automation script to stop via a kill signal
Service: config_mgr/factory_reset
NEPI Internal use: Not part of standard public API. See the reset NEPI ROS topic, instead.
Service: config_mgr/user_reset
NEPI Internal use: Not part of standard public API. See the reset NEPI ROS topic, instead.
Service: <idx_sensor>/idx/capabilities_query
Query for the list of IDX supported features for a particular NEPI IDX sensor
Service: <data_producer>/query_data_products
Query for the list of data products that are produced and can be saved to Data folder by a given data producer NEPI node.
Service: nav_pose_mgr/nav_pose_query
Query for the nav/pose solution with a given timestamp. Timestamp must be within last 5 seconds and will be interpolated if it does not correspond to an exact timestamp at which nav pose was computed. Use timestamp 0.0 to request the latest solution.
Service: nav_pose_mgr/nav_pose_status_query
Query for the current status of the nav/pose system to determine if AHRS and/or GPS input data is flowing.
Service: nepi_darknet_ros_mgr/img_classifier_list_query
Query for the list of Darknet image classifiers currently stored on the NEPI device
Service: nepi_darknet_ros_mgr/img_classifier_status_query
Query for the current status of the Darknet classifier; specifically, if it is running, the input image stream, and the current detection threshold value.
Service: nepi_link_ros_bridge/nepi_link_status_query
Query for the current status of the NEPI Connect subsystem, including whether enabled, currently running, and any scheduling parameters.
Service: network_mgr/bandwidth_usage_query
Query for current network bandwidth consumption and limits on the main NEPI device ethernet port
Service: network_mgr/wifi_query
Query for the current Wifi availability and status for the NEPI device
Service: sequential_image_mux/mux_sequence_query
Query for the list and status of all configured image mux sequences.
Service: system_mgr/op_environment_query
Query for the currently configured operating environment (e.g., air, water)
Service: system_mgr/sw_update_status_query
Query for the detection of a s/w update (in nepi_full_sys_img) folder and the current update execution status/progress.
Service: system_mgr/system_defs_query
Query for a litany of NEPI device system definitions including firmware revision, device ID and serial number, disk capacity and usage, etc.
Service: system_mgr/system_storage_folder_query
Query for the full path to the NEPI storage folder (i.e., user partition). Mostly just for NEPI internal use, but could be helpful for custom nodes that must gather files from or store data to user partition.
Service: time_sync_mgr/time_status_query
Query for the current NEPI device system time and NTP status
Service: trigger_mgr/trigger_defs
Query for the list of triggerable nodes indexed by their individual trigger bitmask offset values
Service: trigger_mgr/trigger_status_query
Query for basic status about the trigger manager; current auto trigger setup (desired and achieved rate), most recent trigger time, etc.
Sensor-specific APIs
Individual sensors, actuators, etc. may provide socket-based interfaces with a more complete set of controls, data streams, etc. than are provided directly by the NEPI APIs. NEPI makes these servers directly available to clients by bridging between disparate subnetworks. For example, a NEPI-connected ONVIF-enabled security camera with IP address 192.168.0.41 running an RTSP server at URL
rtsp://192.168.0.41:554/stream1
can be reached by a client on the NEPI main subnetwork 192.168.179.0/24. Generally this requires setting a default route on the client system that uses the NEPI device as a gateway to the sensor network.
For example, on many modern Linux distributions this can be achieved with the shell command of the form
sudo ip route add 192.168.0.0/24 192.168.179.103 dev enp0s1
Where the specific IP subnetwork and addresses and specific Ethernet device identifier should be set according to the user’s system.
Similarly, on Windows a route can be established via a shell command of the form
route add 192.168.0.0 MASK 255.255.255.0 192.168.179.103
For details about specific sensor APIs, refer to sensor manufacturer documentation.
ROS2 API
Coming Soon!
Interim ROS2 API available via ros1_bridge: https://github.com/ros2/ros1_bridge